Workspaces
The environment setup is adjusted based on selected workspace. The origin of coordinate frame is always placed at the center of the top face of the robot’s stand, the positive x-axis points right from the robot, the positive y-axis points to the front from the robot. At each workspace, 5 cameras are initialized, watching the scene from the back, front, left, right and top.
Name |
Type |
Suitable tasks |
Parameter value |
|---|---|---|---|
Tabledesk |
manipulation |
Reach,Press, Switch,Turn, Push, PNP |
table |
Drawer |
manipulation |
Reach, Pick, PicknPlace |
drawer |
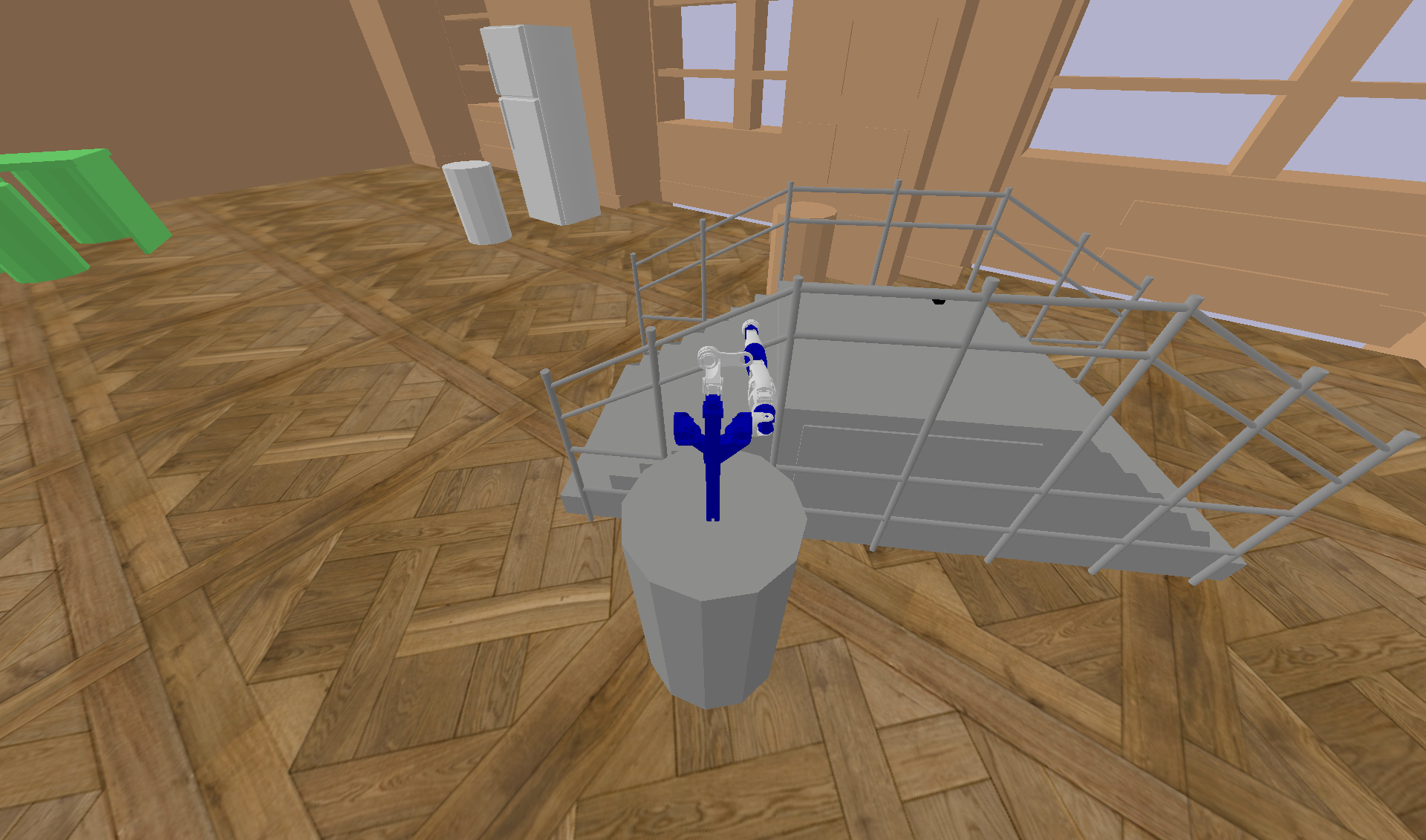
Fridge |
manipulation |
Reach,Push, Open, Close, Pick |
fridge |
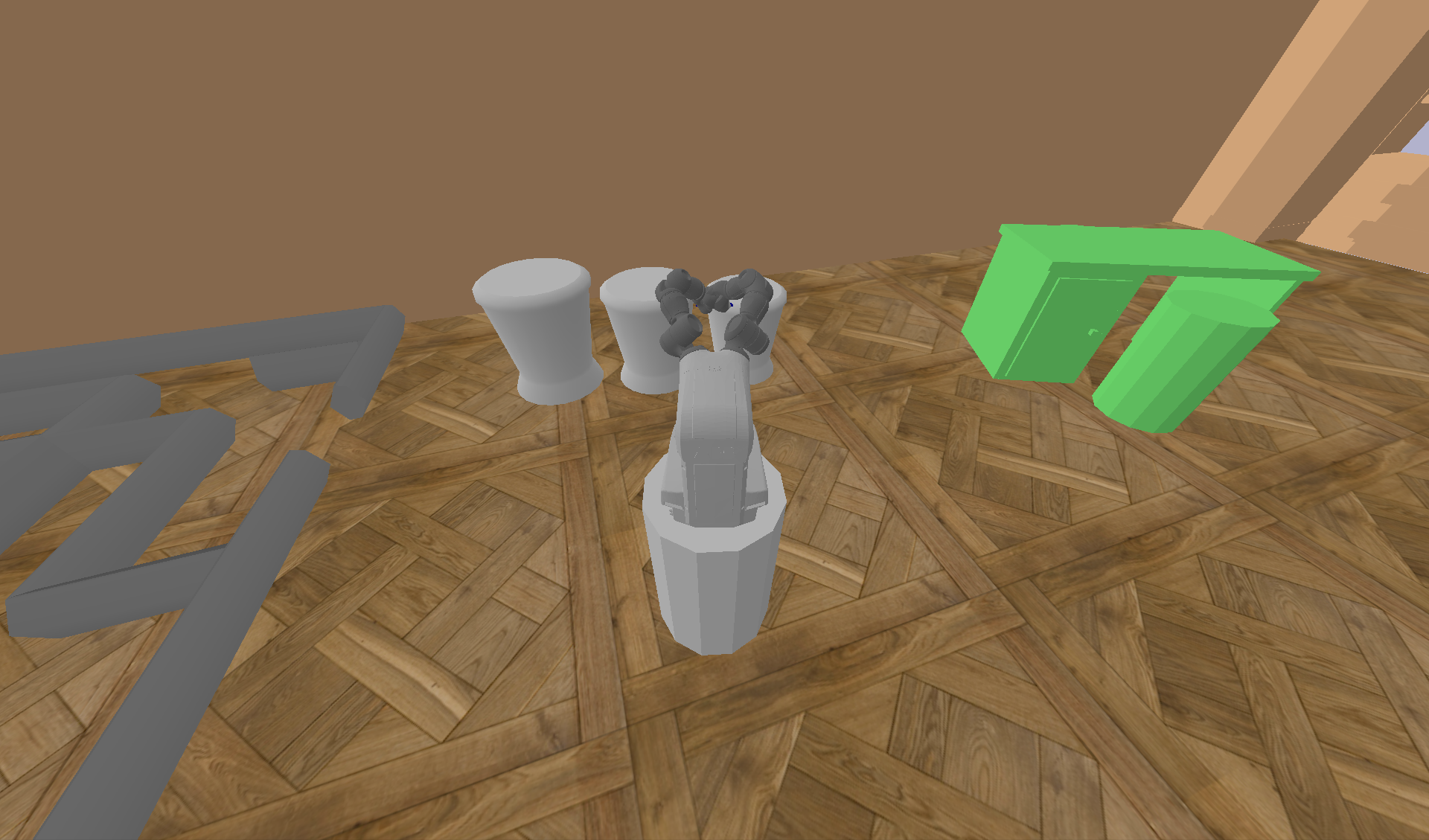
Baskets |
manipulation |
Throw, Hit |
baskets |
Darts |
manipulation |
Throw, Hit |
darts |
Football |
manipulation |
Throw, Hit |
football |
Collaborative table |
collaboration |
Give, Hold, Move together |
collabtable |
Vertical maze |
planning |
– |
veticalmaze |
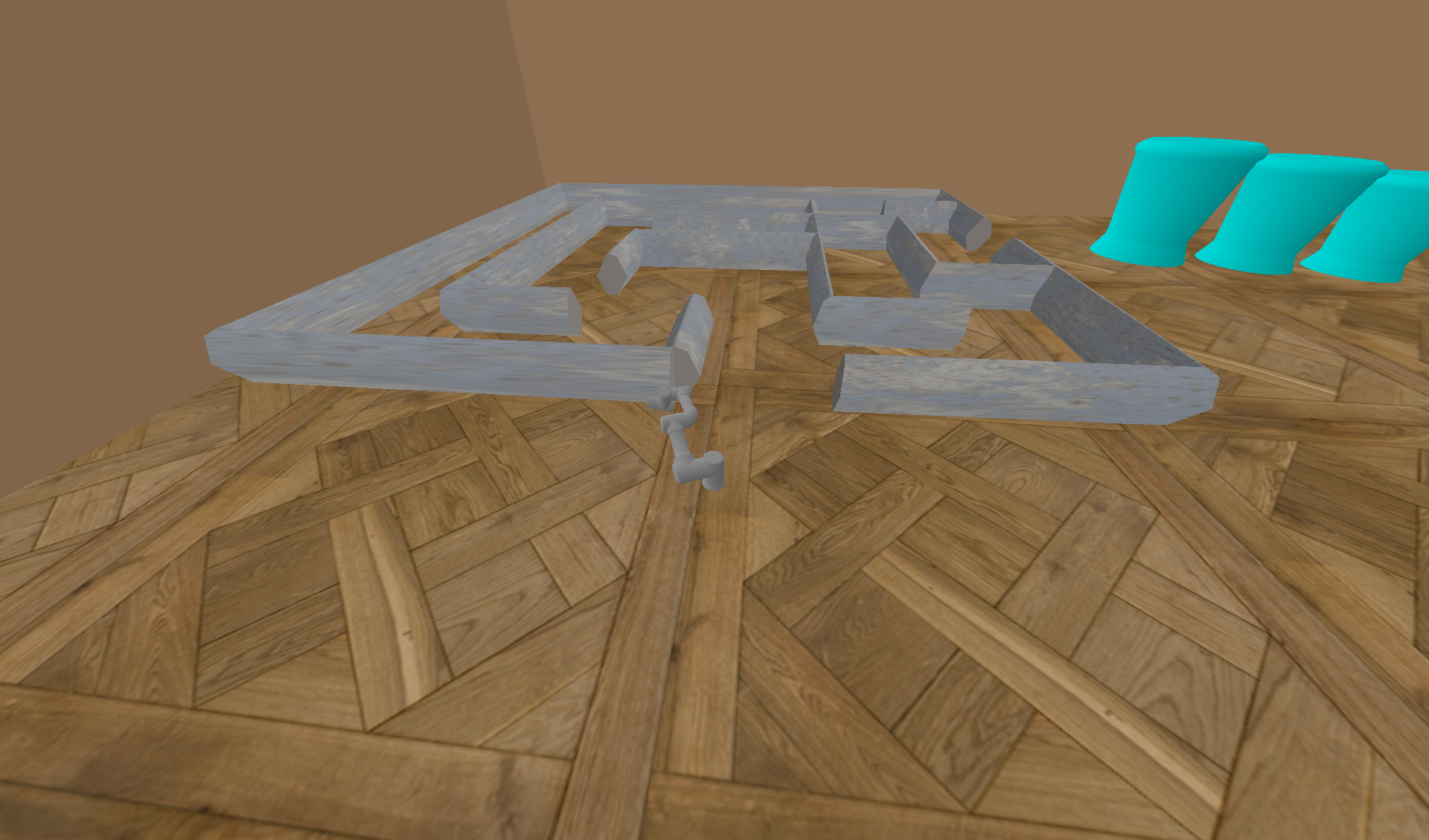
Maze |
navigation |
– |
maze |
Stairs |
navigation |
– |
stairs |
Baskets
Collabtable

Darts
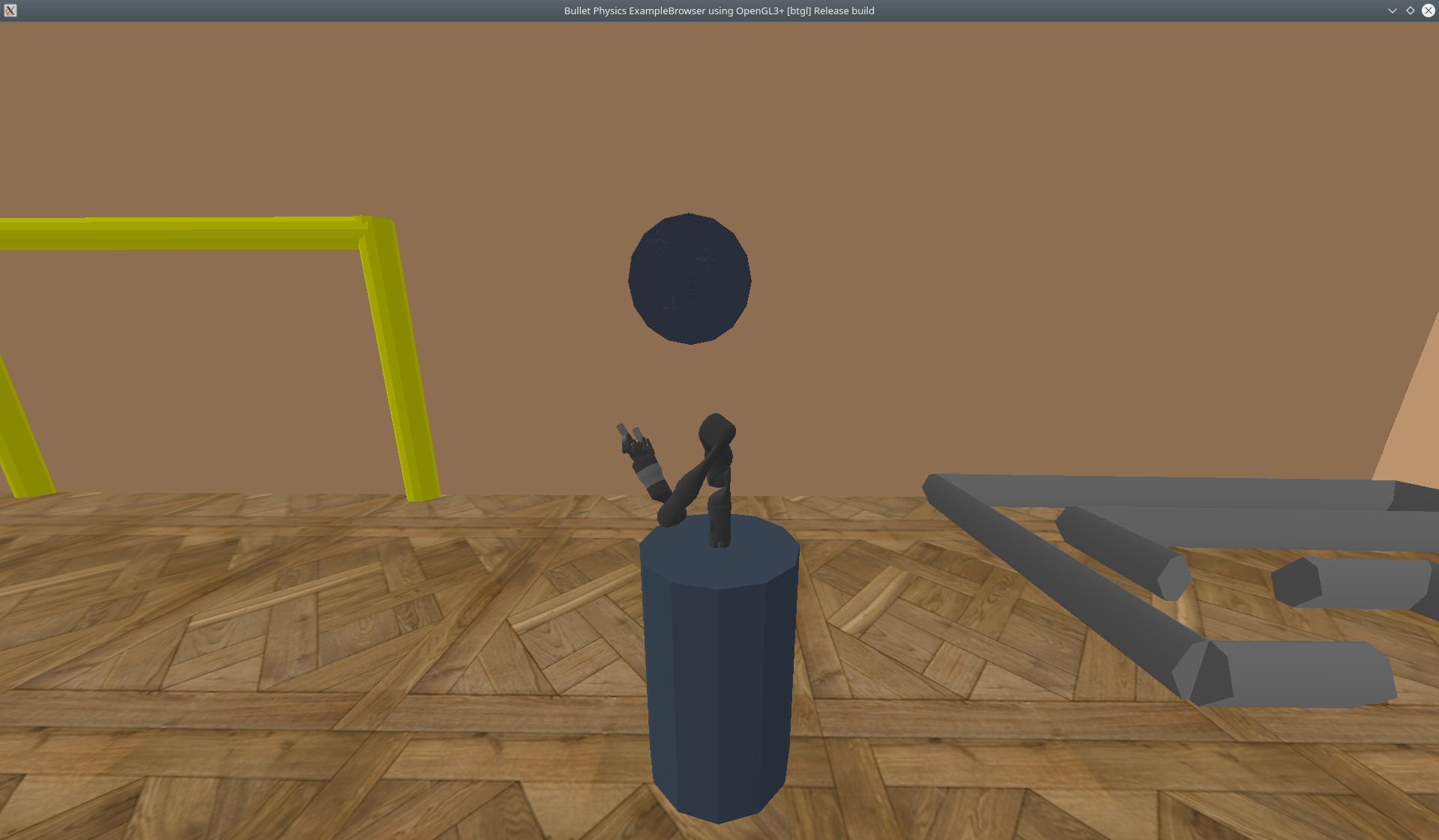
Football

Fridge

Maze
Stairs
Table

Verticalmaze
